智能垃圾分类搬运系统的设计与实现(人工智能第九学期实践项目)
日期:2024-09-05 08:35:34 作者:mafengyuan 来源:人工智能学院 浏览量:0
项目成员:贝熙予,周哲,孙正威,刘子晗,郝晨志
作品简介:智能垃圾分类搬运系统的设计与实现:利用机器人操作系统ROS编程和图像处理技术对垃圾进行实时图像捕捉。采用深度学习算法对捕获的图像进行分析,识别垃圾的种类,如可回收物、厨余垃圾、有害垃圾和其他垃圾。然后对垃圾进行抓取分类放置和搬运到指定位置。
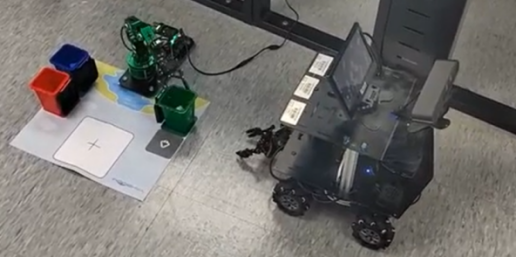
目标检测识别
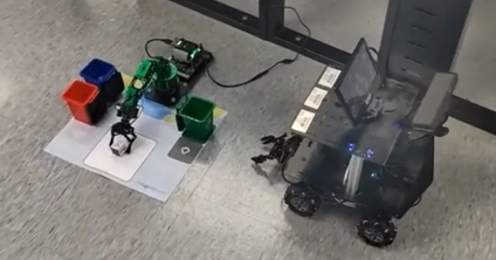
抓取垃圾放入垃圾桶
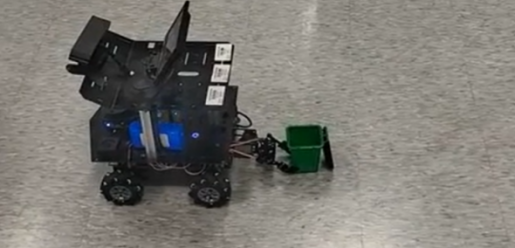
垃圾车抓取垃圾桶

垃圾运送到指定地点